Bedrock's Breakthrough: Multi-AUV Capability
In December of 2023, Bedrock Ocean Exploration took a significant step towards what has always been our goal – operating our autonomous underwater vehicles (AUVs) as a fleet. Our AUVs are incredibly powerful tools for mapping the seafloor – we can provide bathymetry data at sub-meter resolution, image tiny contacts using our sidescan, detect subtle magnetic variations with our magnetometer, and operate such that we pose no risk to marine mammals. The catch is, to get all this valuable data, AUVs need to hug the seafloor pretty closely, which means each AUV can only cover a small area in a day. Therefore it has always been Bedrock's view that we shouldn't be deploying just one AUV to map a region. Instead, our vision is a whole fleet of AUVs deployed together, working as one unit, to characterize much larger swaths of seafloor with precision.

It is only through a multi-AUV approach that Bedrock can achieve our ultimate goal of mapping the entire ocean repeatedly. Executing on that goal requires more than just vision, it requires scalable efficiency: we must lower the costs and time associated with mobilization and demobilization, reduce the ratio of operators to autonomous assets, and ensure that AUVs return with a reliable end product every time they are deployed. This way mapping the entire ocean can be done economically, at scale. By thoroughly mapping and studying the oceans, we can unlock valuable information that could lead to innovative solutions for environmental conservation, sustainable living, energy and resource optimization, and perhaps even new technologies or discoveries that could benefit humanity as a whole.
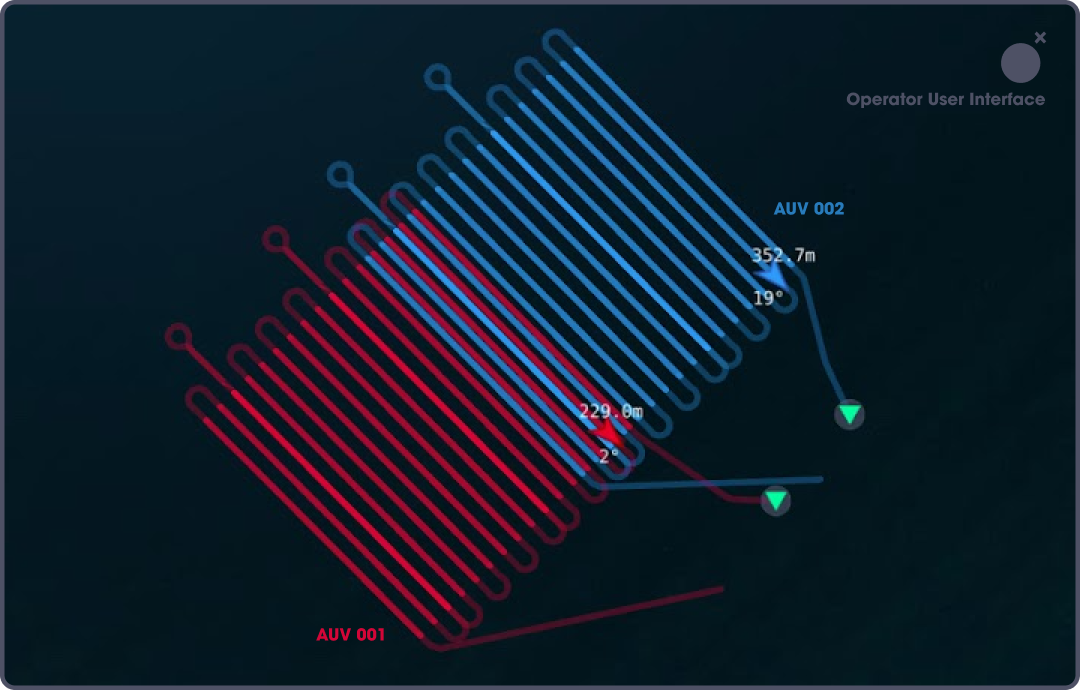
Figure 1. The first planned and operator view of multi—AUV operations.
In Bedrock’s December field test we made a big leap towards fleet-scale operations. In this test we planned a staged approach, and the first step was launching two AUVs in the ocean. This was no small feat and deserves a shoutout to our incredible team, who poured their expertise into everything from developing the software for seamless autonomy across the AUVs, to engineering our very own launch and recovery system. With the AUVs in the water, we conducted a series of tests to make sure they played nice and didn't interfere with each other's operations. The grand finale involved each vehicle mapping out its own section of the seafloor, ensuring a 57-meter overlap between their areas for cohesive data integration and to facilitate a thorough comparison of data collected by the two vehicles.
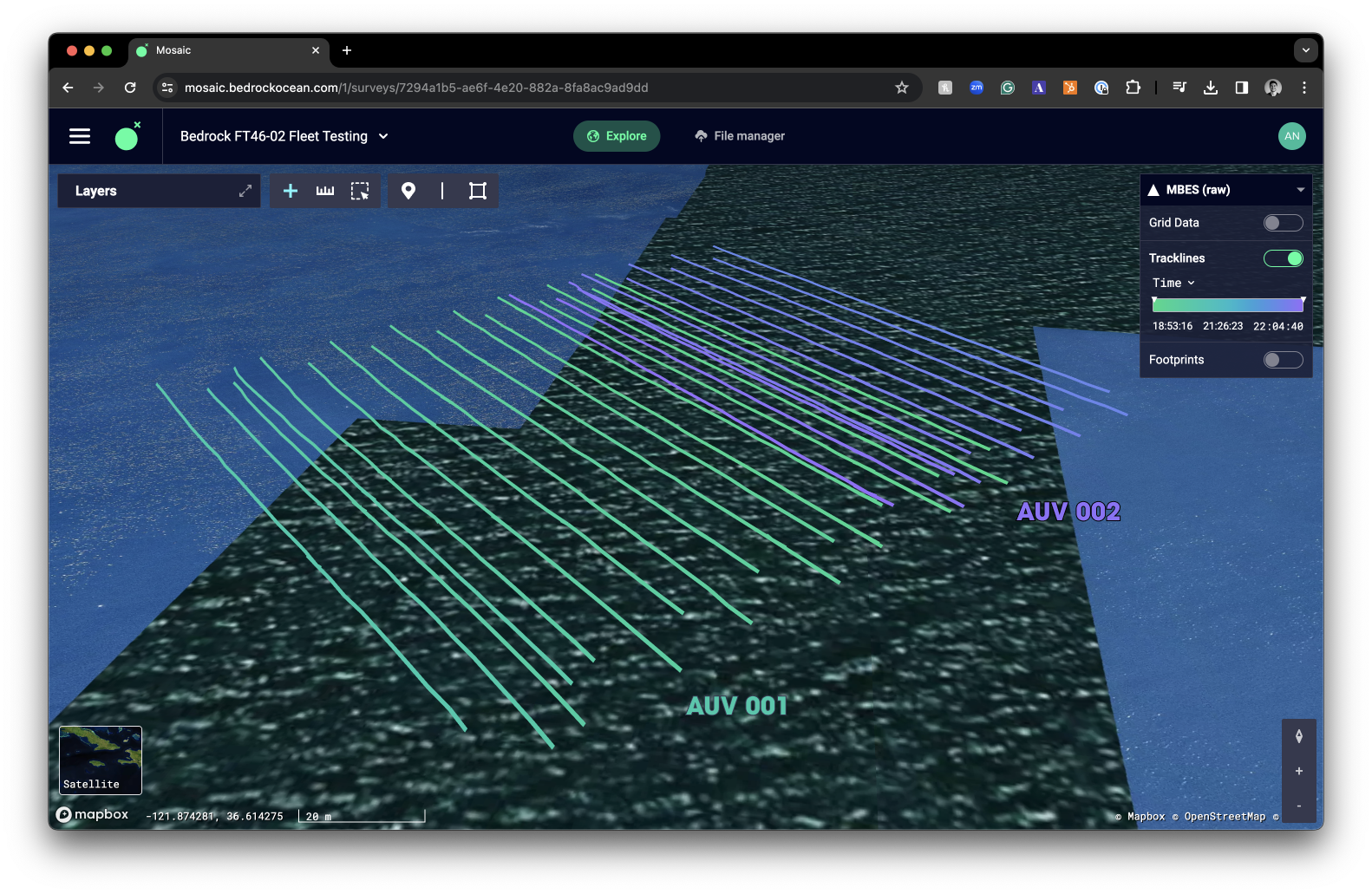
Figure 2. Track lines of the lawns collected using AUV001 and AUV002 shown in mosaic, our cloud data platform.
The operation was a resounding success, with both AUVs performing as expected and delivering high-quality data:

Figure 3. Bathymetry data from both vehicles gridded at 50 cm resolution, datasets were processed following identical procedures and result in a beautiful continuous surface characterized by the shalebed striations of the region.
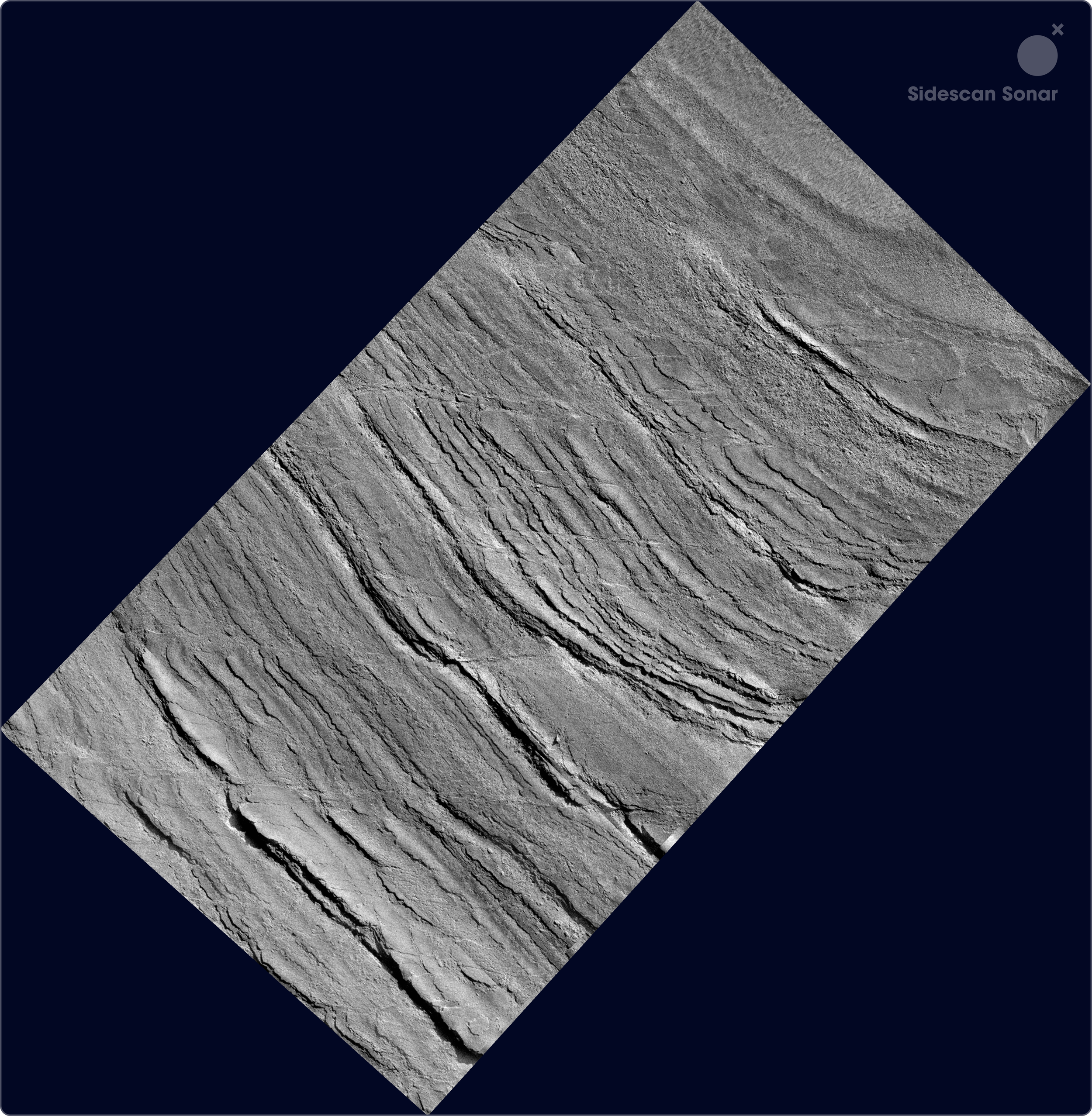
Figure 4. Side-scan sonar data mosaiced at 10 cm resolution from both vehicles, showing a seamless surface

Figure 5. Magnetometer analytic signal data from both AUVs, gridded at 0.5 m resolution. Despite this being a magnetically quiet region, the data effectively demonstrates the integration of datasets from the two AUVs.
The data collected provided a detailed snapshot of the ocean floor. The bathymetric data showed an impressive level of continuity, with only a 0.02 m difference in our overlapping region. Side-scan sonar imagery in the overlap region showed alignment across AUVs regarding the location of the shalebed outcrops. Additionally, the magnetometer data confirmed the smooth merging of information, though it is a fairly magnetically quiet region. To see all this data, and read a report with more detailed exploration of the comparison between datasets collected on our AUVs, visit here.
But it wasn't just about collecting data. This test was a testament to the power of teamwork - not just among our crew but between our AUVs. The success of this mission demonstrates the incredible potential of multi-AUV operations, the first step towards a future where fleets of AUVs can work together, covering vast areas of the ocean floor with efficiency and precision that was once deemed impossible.
This field test realized a vision and validated a bold approach that was architected here at Bedrock since day 1, proving that when it comes to understanding our oceans, two heads (or in this case, AUVs) are indeed better than one. Buoyed by this success, we're now setting our sights on expanding our fleet, gearing up to build and deploy even more AUVs to take our ocean exploration capabilities to new depths. It’s field tests like these that remind all of us how much we love our jobs — we get to experience the exhilaration of discovery that comes with mapping a world that no one has fully explored before, and share that with the world on a web platform that we have built.
Stay tuned for next week's update, where we will explore Bedrock’s final field test of 2023 – seeking out and mapping an abandoned anchor in the Monterey Bay National Marine Sanctuary.
Written by Bridgit Boulahanis and Charles Chiau.
Permit #: MBNMS-2022-023-A1